
Soomal 于 2020.02.25 21:24:38 | 源自:www.soomal.com | 版权:原创 | 平均/总评分:09.67/87
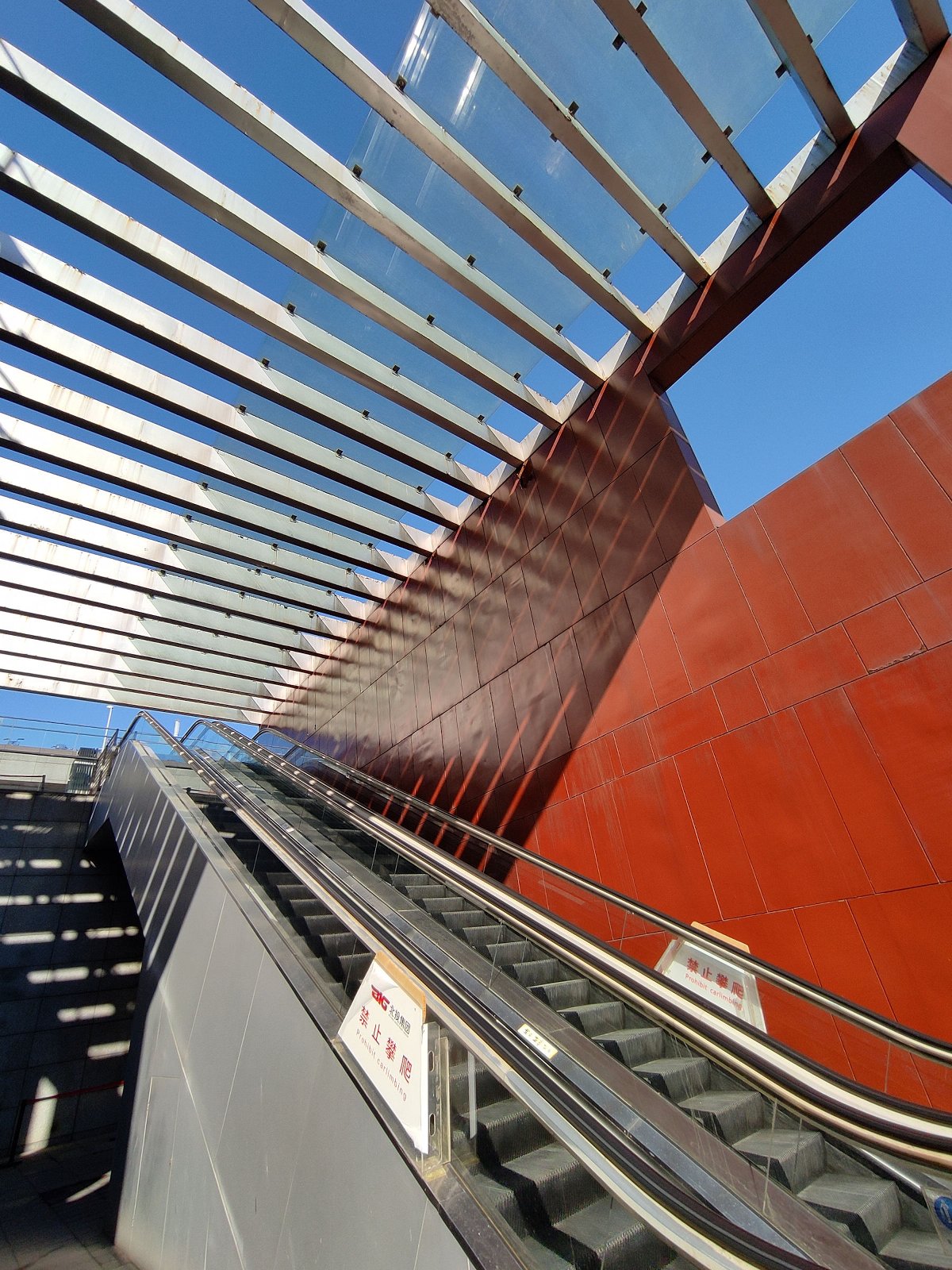
超广和2X样张

制造商=XIAOMI;型号=REDMI K30;焦距=5毫米;等效焦距=25毫米;光圈=F1.9;测光模式=中央平均;感光度=ISO100;白平衡=自动;曝光补偿=0.0EV;曝光时间=1/1515秒;曝光程序=程序模式;场景类型=标准;日期=2020.02.16 11:18:17

制造商=XIAOMI;型号=REDMI K30;焦距=5毫米;等效焦距=25毫米;光圈=F1.9;测光模式=中央平均;感光度=ISO100;白平衡=自动;曝光补偿=0.0EV;曝光时间=1/1730秒;曝光程序=程序模式;场景类型=标准;日期=2020.02.16 11:29:16

制造商=XIAOMI;型号=REDMI K30;焦距=5毫米;等效焦距=25毫米;光圈=F1.9;测光模式=中央平均;感光度=ISO100;白平衡=自动;曝光补偿=0.0EV;曝光时间=1/1346秒;曝光程序=程序模式;场景类型=标准;日期=2020.02.16 11:41:10

制造商=XIAOMI;型号=REDMI K30;焦距=5毫米;等效焦距=25毫米;光圈=F1.9;测光模式=中央平均;感光度=ISO100;白平衡=自动;曝光补偿=0.0EV;曝光时间=1/1386秒;曝光程序=程序模式;场景类型=标准;日期=2020.02.16 11:50:52

制造商=XIAOMI;型号=REDMI K30;焦距=5毫米;等效焦距=25毫米;光圈=F1.9;测光模式=中央平均;感光度=ISO100;白平衡=自动;曝光补偿=0.0EV;曝光时间=1/1161秒;曝光程序=程序模式;场景类型=标准;日期=2020.02.16 11:57:22

制造商=XIAOMI;型号=REDMI K30;焦距=5毫米;等效焦距=25毫米;光圈=F1.9;测光模式=中央平均;感光度=ISO100;白平衡=自动;曝光补偿=0.0EV;曝光时间=1/1078秒;曝光程序=程序模式;场景类型=标准;日期=2020.02.16 12:08:31

制造商=XIAOMI;型号=REDMI K30;焦距=5毫米;等效焦距=25毫米;光圈=F1.9;测光模式=中央平均;感光度=ISO100;白平衡=自动;曝光补偿=0.0EV;曝光时间=1/1449秒;曝光程序=程序模式;场景类型=标准;日期=2020.02.16 12:13:46

制造商=XIAOMI;型号=REDMI K30;焦距=5毫米;等效焦距=25毫米;光圈=F1.9;测光模式=中央平均;感光度=ISO100;白平衡=自动;曝光补偿=0.0EV;曝光时间=1/4456秒;曝光程序=程序模式;场景类型=标准;日期=2020.02.16 12:33:04

制造商=XIAOMI;型号=REDMI K30;焦距=5毫米;等效焦距=25毫米;光圈=F1.9;测光模式=中央平均;感光度=ISO109;白平衡=自动;曝光补偿=0.0EV;曝光时间=1/100秒;曝光程序=程序模式;场景类型=标准;日期=2020.02.17 14:24:15

制造商=XIAOMI;型号=REDMI K30;焦距=2毫米;等效焦距=4毫米;光圈=F2.2;测光模式=中央平均;感光度=ISO100;白平衡=自动;曝光补偿=0.0EV;曝光时间=1/921秒;曝光程序=程序模式;场景类型=标准;日期=2020.02.16 11:17:10

制造商=XIAOMI;型号=REDMI K30;焦距=2毫米;等效焦距=4毫米;光圈=F2.2;测光模式=中央平均;感光度=ISO100;白平衡=自动;曝光补偿=0.0EV;曝光时间=1/894秒;曝光程序=程序模式;场景类型=标准;日期=2020.02.16 11:24:44

制造商=XIAOMI;型号=REDMI K30;焦距=2毫米;等效焦距=4毫米;光圈=F2.2;测光模式=中央平均;感光度=ISO100;白平衡=自动;曝光补偿=0.0EV;曝光时间=1/855秒;曝光程序=程序模式;场景类型=标准;日期=2020.02.16 12:22:46

制造商=XIAOMI;型号=REDMI K30;焦距=2毫米;等效焦距=4毫米;光圈=F2.2;测光模式=中央平均;感光度=ISO100;白平衡=自动;曝光补偿=0.0EV;曝光时间=1/565秒;曝光程序=程序模式;场景类型=标准;日期=2020.02.16 12:32:34

制造商=XIAOMI;型号=REDMI K30;焦距=2毫米;等效焦距=4毫米;光圈=F2.2;测光模式=中央平均;感光度=ISO100;白平衡=自动;曝光补偿=0.0EV;曝光时间=1/951秒;曝光程序=程序模式;场景类型=标准;日期=2020.02.16 13:05:25

制造商=XIAOMI;型号=REDMI K30;焦距=2毫米;等效焦距=4毫米;光圈=F2.2;测光模式=中央平均;感光度=ISO100;白平衡=自动;曝光补偿=0.0EV;曝光时间=1/855秒;曝光程序=程序模式;场景类型=标准;日期=2020.02.16 13:13:38

制造商=XIAOMI;型号=REDMI K30;焦距=2毫米;等效焦距=4毫米;光圈=F2.2;测光模式=中央平均;感光度=ISO100;白平衡=自动;曝光补偿=0.0EV;曝光时间=1/980秒;曝光程序=程序模式;场景类型=标准;日期=2020.02.16 13:17:14

制造商=XIAOMI;型号=REDMI K30;焦距=2毫米;等效焦距=4毫米;光圈=F2.2;测光模式=中央平均;感光度=ISO100;白平衡=自动;曝光补偿=0.0EV;曝光时间=1/695秒;曝光程序=程序模式;场景类型=标准;日期=2020.02.16 13:26:42

制造商=XIAOMI;型号=REDMI K30;焦距=2毫米;等效焦距=4毫米;光圈=F2.2;测光模式=中央平均;感光度=ISO100;白平衡=自动;曝光补偿=0.0EV;曝光时间=1/1372秒;曝光程序=程序模式;场景类型=标准;日期=2020.02.16 13:44:32

制造商=XIAOMI;型号=REDMI K30;焦距=2毫米;等效焦距=4毫米;光圈=F2.2;测光模式=中央平均;感光度=ISO100;白平衡=自动;曝光补偿=0.0EV;曝光时间=1/2202秒;曝光程序=程序模式;场景类型=标准;日期=2020.02.16 13:49:16

制造商=XIAOMI;型号=REDMI K30;焦距=2毫米;等效焦距=4毫米;光圈=F2.2;测光模式=中央平均;感光度=ISO100;白平衡=自动;曝光补偿=0.0EV;曝光时间=1/491秒;曝光程序=程序模式;场景类型=标准;日期=2020.02.16 13:56:19

制造商=XIAOMI;型号=REDMI K30;焦距=2毫米;等效焦距=4毫米;光圈=F2.2;测光模式=中央平均;感光度=ISO100;白平衡=自动;曝光补偿=0.0EV;曝光时间=1/1010秒;曝光程序=程序模式;场景类型=标准;日期=2020.02.17 13:39:05
制造商=XIAOMI;型号=REDMI K30;焦距=2毫米;等效焦距=4毫米;光圈=F2.2;测光模式=中央平均;感光度=ISO100;白平衡=自动;曝光补偿=0.0EV;曝光时间=1/1102秒;曝光程序=程序模式;场景类型=标准;日期=2020.02.17 14:15:57

制造商=XIAOMI;型号=REDMI K30;焦距=2毫米;等效焦距=4毫米;光圈=F2.2;测光模式=中央平均;感光度=ISO100;白平衡=自动;曝光补偿=0.0EV;曝光时间=1/510秒;曝光程序=程序模式;场景类型=标准;日期=2020.02.17 14:19:39

制造商=XIAOMI;型号=REDMI K30;焦距=2毫米;等效焦距=4毫米;光圈=F2.2;测光模式=中央平均;感光度=ISO100;白平衡=自动;曝光补偿=0.0EV;曝光时间=1/991秒;曝光程序=程序模式;场景类型=标准;日期=2020.02.17 14:26:28

制造商=XIAOMI;型号=REDMI K30;焦距=2毫米;等效焦距=4毫米;光圈=F2.2;测光模式=中央平均;感光度=ISO100;白平衡=自动;曝光补偿=0.0EV;曝光时间=1/374秒;曝光程序=程序模式;场景类型=标准;日期=2020.02.17 14:29:15

制造商=XIAOMI;型号=REDMI K30;焦距=2毫米;等效焦距=4毫米;光圈=F2.2;测光模式=中央平均;感光度=ISO100;白平衡=自动;曝光补偿=0.0EV;曝光时间=1/2873秒;曝光程序=程序模式;场景类型=标准;日期=2020.02.17 15:19:00

















03
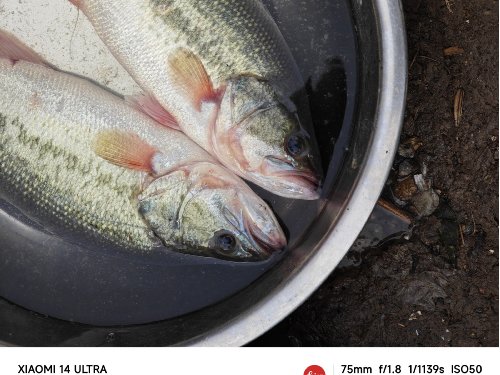
只说主摄,感觉reno的最差,纹理细节和暗部细节损失最严重,摄像头也糊的厉害。
红米纹理细节还行,但是锐化算法太粗糙,还有整体曝光偏高一些,这时造成色彩干涩的一个因素吧。
vivoX30P整体均衡的多,锐化算法比较细腻,高光阴影层次都还好,饱和度过了点。
红米纹理细节还行,但是锐化算法太粗糙,还有整体曝光偏高一些,这时造成色彩干涩的一个因素吧。
vivoX30P整体均衡的多,锐化算法比较细腻,高光阴影层次都还好,饱和度过了点。
18
157.255.***.***
157.255.***.***
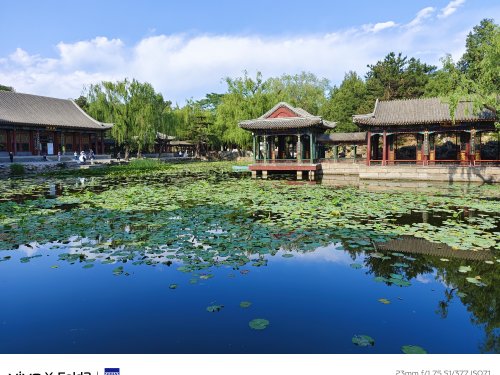
从图集看出它是和OPPO Reno3 Pro及vivo X30 Pro同时同地拍摄的。
把三个图集的“相同”图片同时打开,可看出OPPO Reno3的细节是最差的,有些地方的暗处更明显是少。而这不是K30用“锐化”二字能办到的。OPPO Reno3的紫边相对也严重,有些地方都是成片了。
把三个图集的“相同”图片同时打开,可看出OPPO Reno3的细节是最差的,有些地方的暗处更明显是少。而这不是K30用“锐化”二字能办到的。OPPO Reno3的紫边相对也严重,有些地方都是成片了。
16
03
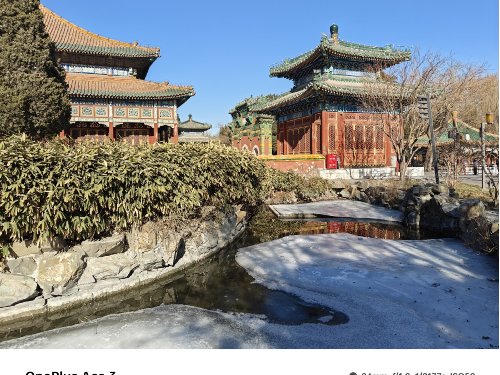
HDR触发得不够积极,有些场景高光溢出,暗部死黑。细节尚可,锐化有点过了。照片颜色整体太素了。超广的细节表现意外的比想象中好,就是颜色依然不好看。考虑到1500的售价,还是香的。
此帖使用Win10提交
此帖使用Win10提交
13
 京公网安备 11011402011520号
京公网安备 11011402011520号
此帖使用Win10提交